近日,我院陈鲁倬教授团队在马兰戈尼游泳机器人领域取得重要进展。受高性能赛车多模式驱动策略启发,团队设计并构建了一种基于碳纳米管-纤维素/聚乙烯复合材料的电-化学双驱动机制马兰戈尼驱动器与游泳机器人,成功实现了水面高速运动与可编程轨迹控制。相关研究成果以“Racing-car-inspired electrical/chemical dual-driven actuators for swimming Marangoni robots based on carbon nanotube composites”为题,发表于一区期刊《Nano Research》。
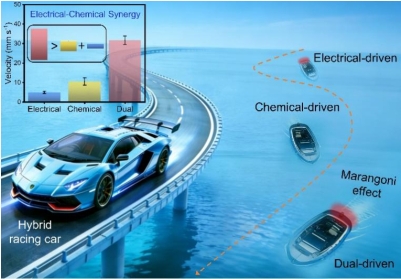
基于马兰戈尼效应的水上驱动器与游泳机器人近年来受到广泛关注。现有的马兰戈尼驱动器多依赖光驱动或化学驱动,但如何在单一器件中同时实现高速运动与可编程控制仍是一项挑战。针对这一问题,研究团队借鉴高性能赛车“电动模式、燃料模式、混动模式”的多模式驱动策略,提出并实现了一种电-化学双驱动的复合驱动器。
该驱动器在电驱动模式下,可通过碳纳米管-纤维素复合材料的焦耳热效应形成局域温度梯度,实现驱动器的水面可编程直线与转弯运动;在化学驱动模式下,驱动器通过尾部释放“燃料”,实现快速自主推进。尤为重要的是,当电、化学驱动同时施加时,驱动器进入双驱动协同模式,其运动速度可超过纯电驱动速度与纯化学驱动速度之和。
福建师范大学为论文第一完成单位,论文共同第一作者为硕士研究生陈宇航、钱永强博士,通讯作者为陈鲁倬教授、罗志灵副教授和钱永强博士。该研究获得了国家自然科学基金面上项目、福建省自然科学基金重点项目等的支持。
论文链接:https://www.sciopen.com/article/10.26599/NR.2026.94908831
